
PROGRAMACIÓN AVANZADA CON M221 Y COMUNICACIONES
Descripción de la función PID y AT del M221
Función e influencia de los parámetros del PID
-
Si Ti ≠ 0, se usa un algoritmo incremental.
-
Si Ti = 0, se usa un algoritmo posicional, junto con un offset de +5.000 que se aplica a la salida del PID.
-
Una respuesta más rápida
-
Un menor índice de errores estáticos
-
Disminución de la estabilidad
-
Una respuesta más rápida
-
Disminución de la estabilidad
-
Una respuesta más lenta
-
Un rebasamiento reducido

El rendimiento del control de proceso depende del coeficiente .
El control de proceso del PID se alcanza en el dominio siguiente: 2< <20.
El control de proceso del PID es más conveniente para la regulación de procesos que satisfagan la condición siguiente:
- Para <2, es decir, para bucles de control rápidos ( bajo) o para procesos con un gran retardo (t alto), el control de proceso del PID ya no es adecuado. En estos casos, deben utilizarse algoritmos más complejos.
- Para >20, basta con un control de proceso que utilice un umbral más histéresis
AJUSTE AUTOMÁTICO AT (AUTOTUNNIG)
Introducción
La modalidad de ajuste automático permite ajustar automáticamente Kp, Ti, Td y los parámetros de acción para conseguir una convergencia refinada de la función del PIDEcoStruxure Machine Expert – Basic. La función de sintonización automática proporcionada por está especialmente diseñada para la sintonización automática de los procesos térmicos.
Esta sección contiene los siguientes temas:
- Requisitos del ajuste automático
- Descripción del proceso de ajuste automático
- Almacenamiento de coeficientes calculados
- Ajuste de parámetros del PID
- Inicio de ajuste automático
- Limitaciones del ajuste automático y el control del PID
Requisitos del ajuste automático
Al utilizar la función de ajuste automático, asegúrese de que el proceso de control y el controlador lógico cumplen con los requisitos siguientes:
- Requisitos del proceso:
- El proceso debe ser un sistema de bucle abierto estable.
- El proceso debe ser principalmente lineal en todo el rango de funcionamiento.
- La respuesta del proceso a un cambio de nivel de la salida analógica sigue un patrón asintótico transitorio.
- El proceso está en estado estable con una entrada nula al inicio de la secuencia de ajuste automático.
- El proceso debe estar libre de perturbaciones en su totalidad. De lo contrario, los parámetros calculados podrían ser incorrectos o el proceso de ajuste automático podría no funcionar correctamente.
- Requisitos de configuración:
- Configure el controlador lógico en modalidad de exploración periódica para asegurar una correcta ejecución de la función de ajuste automático.
- Utilice la función de ajuste automático únicamente cuando no haya ningún controlador PID en ejecución.
- Configure los coeficientes Kp, Ti y Td como direcciones de palabras de memoria (%MWxx).
- Establezca el tipo de acción en la ficha Salida en una dirección de bit de memoria (%Mxx).
Descripción del proceso de ajuste automático
En la ilustración siguiente se describe el ajuste automático en el controlador y en la aplicación:
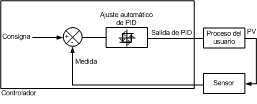
Descripción del proceso de calibración de ajuste automático
El proceso de calibración de ajuste automático se divide en cuatro fases consecutivas. Se deben completar todas las fases del proceso para que el ajuste automático se realice de forma satisfactoria. Las curvas de respuesta del proceso y la tabla siguientes describen las cuatro fases de la función de ajuste automático del PID de EcoStruxure Machine Expert – Basic:
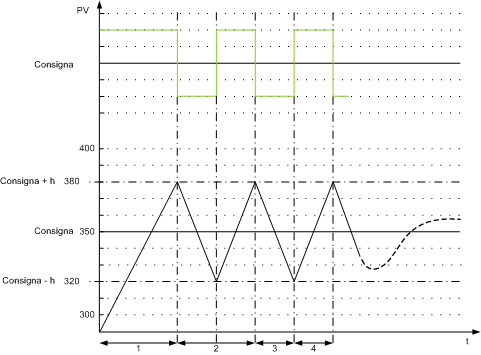
PV Valor del proceso
___ Salida de PID
h = 1 % (valor Máx. – valor Mín.) del campo Rango de medición en la ficha AT
—- PID activo
1-4 Fases de ajuste automático (consulte la tabla a continuación)
En la tabla siguiente se describen las fases de ajuste automático:
Fase de ajuste automático:
- Para la salida de PID se fuerza el valor Máx. del campo Límites en la ficha Salida hasta que el valor de proceso alcance la consigna + h
- En la fase 2 de ajuste automático hay dos pasos:
- Para la salida de PID se fuerza el valor Mín. del campo Límites en la ficha Salida hasta que el valor de proceso alcance la consigna – h.
- Para la salida de PID se fuerza el valor Máx. del campo Límites en la ficha Salida hasta que el valor de proceso alcance la consigna + h
- Para la salida de PID se fuerza el valor Mín. del campo Límites en la ficha Salida hasta que el valor de proceso alcance la consigna – h.
- En la fase 4 de ajuste automático hay dos pasos:
- Para la salida de PID se fuerza el valor Máx. del campo Límites en la ficha Salida hasta que el valor de proceso alcance la consigna + h.
- Para la salida de PID se fuerza el valor Mín. del campo Límites en la ficha Salida, los parámetros de PID se calculan y el PID se activa.
(1) La última salida aplicada al proceso antes de iniciar el ajuste automático se utiliza como punto de inicio y punto de relajación del proceso de ajuste automático.
NOTA: Los parámetros Kp, Ti y Td no se pueden calcular si se activa el control de salida manual durante el proceso de calibración de ajuste automático. Inicie de nuevo el proceso de calibración de ajuste automático una vez que finalice el control manual de salidas.
Almacenamiento de coeficientes calculados
Una vez completada la secuencia de ajuste automático, las palabras de memoria asignadas a los coeficientes Kp, Ti y Td y el tipo de acción se establecen a partir de los valores calculados. Estos valores se escriben en la memoria RAM y se guardan en el controlador lógico mientras la aplicación sea válida y no se realice un arranque en frío (%S0).
Si el sistema no se ve afectado por perturbaciones externas, los valores calculados pueden escribirse en la configuración del controlador PID (consulte la ficha PID del Asistente de PID). De este modo, la modalidad de funcionamiento del controlador PID se puede establecer en la modalidad PID.
Ajuste de los parámetros del PID
El método de ajuste automático produce un comando extremadamente dinámico que puede provocar rebasamientos no deseados durante el cambio de paso de consignas. Para restringir la regulación del proceso que proporcionan los parámetros del PID (Kp, Ti, Td) obtenidos durante el ajuste automático, también puede ajustar manualmente dichos valores de los parámetros, directamente desde la ficha PID de la pantalla Asistente de PID o mediante las palabras de memoria correspondientes (%MW).
Inicio de ajuste automático
En la ficha AT, la Consigna de salida permite la repetición de la secuencia de ajuste automático. El proceso de ajuste automático se ejecuta en cada flanco ascendente de la señal vinculado a la Consigna de salida.
Limitaciones de la utilización del ajuste automático
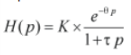
Los procesos térmicos pueden a menudo asimilarse al primer orden del modelo de retardo puro. Hay dos parámetros clave que describen este tipo de modelo:
- la constante de tiempo, τ
- el tiempo de retardo, θ
El ajuste automático es más conveniente para procesos en los que la constante de tiempo (τ) y el tiempo de retardo (θ) cumplen los requisitos siguientes:
- 10 s < (τ + θ) < 2.700 s (es decir: 45 min)
- 2 < τ / θ < 20